Public Member Functions | |
| Search_node (Tile_coord &t, short scost, short gcost, Search_node *p) | |
| Search_node (Tile_coord &t) | |
| Tile_coord | get_tile () const |
| int | get_start_cost () |
| int | get_goal_cost () |
| int | get_total_cost () |
| int | is_open () |
| void | update (short scost, short gcost, Search_node *p) |
| Tile_coord * | create_path (int &pathlen) |
| void | add_to_chain (Search_node *&last) |
| void | remove_from_chain (Search_node *&last) |
Static Public Member Functions | |
| static Search_node * | remove_first_from_chain (Search_node *&last) |
Private Attributes | |
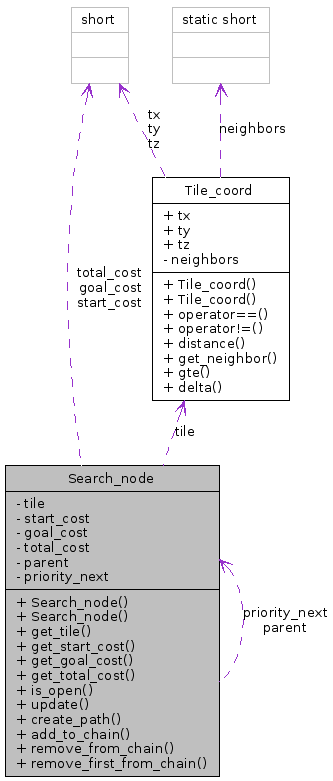
| Tile_coord | tile |
| short | start_cost |
| short | goal_cost |
| short | total_cost |
| Search_node * | parent |
| Search_node * | priority_next |
Definition at line 85 of file path.cc.
| Search_node::Search_node | ( | Tile_coord & | t, | |
| short | scost, | |||
| short | gcost, | |||
| Search_node * | p | |||
| ) | [inline] |
| Search_node::Search_node | ( | Tile_coord & | t | ) | [inline] |
| Tile_coord Search_node::get_tile | ( | ) | const [inline] |
Definition at line 104 of file path.cc.
References tile.
Referenced by Find_path(), Equal_nodes::operator()(), and Hash_node::operator()().
| int Search_node::get_start_cost | ( | ) | [inline] |
| int Search_node::get_goal_cost | ( | ) | [inline] |
| int Search_node::get_total_cost | ( | ) | [inline] |
Definition at line 110 of file path.cc.
References total_cost.
Referenced by A_star_queue::add_back(), and A_star_queue::remove_from_open().
| int Search_node::is_open | ( | ) | [inline] |
Definition at line 112 of file path.cc.
References priority_next.
Referenced by A_star_queue::remove_from_open().
| void Search_node::update | ( | short | scost, | |
| short | gcost, | |||
| Search_node * | p | |||
| ) | [inline] |
Definition at line 114 of file path.cc.
References goal_cost, parent, start_cost, and total_cost.
Referenced by Find_path().
| Tile_coord* Search_node::create_path | ( | int & | pathlen | ) | [inline] |
| void Search_node::add_to_chain | ( | Search_node *& | last | ) | [inline] |
Definition at line 166 of file path.cc.
References priority_next.
Referenced by A_star_queue::add_back().
| void Search_node::remove_from_chain | ( | Search_node *& | last | ) | [inline] |
Definition at line 184 of file path.cc.
References priority_next.
Referenced by A_star_queue::remove_from_open().
| static Search_node* Search_node::remove_first_from_chain | ( | Search_node *& | last | ) | [inline, static] |
Definition at line 218 of file path.cc.
References priority_next.
Referenced by A_star_queue::pop().
Tile_coord Search_node::tile [private] |
short Search_node::start_cost [private] |
short Search_node::goal_cost [private] |
short Search_node::total_cost [private] |
Search_node* Search_node::parent [private] |
Search_node* Search_node::priority_next [private] |
Definition at line 92 of file path.cc.
Referenced by add_to_chain(), is_open(), remove_first_from_chain(), and remove_from_chain().
 1.5.1
1.5.1